扫一扫查看
加入我们
加入我们


TIS 驱动TUfast: 大学生在无人驾驶竞赛挑战中获得胜利
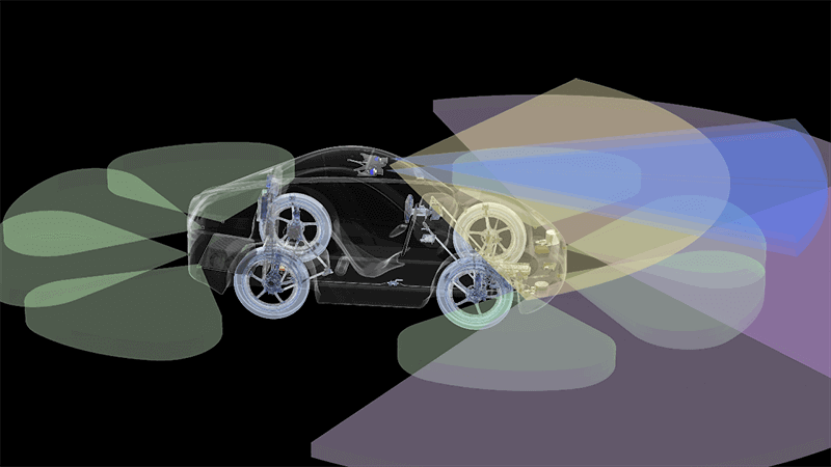
muc018所涵盖的所有感测范围: 运用多种不同传感技术(包括以相机为基础的数据侦测),为无人驾驶提供360度覆盖感测范围。
由慕尼黑技术大学学生所发起的TUfast已参与Formula SAE竞赛超过15年时间。2010年,一组以开发高效以及永续能源车的团队: TUfast Eco 团队正式登场。继他们初发表的第一辆城市概念(UrbanConcept)车(muc017) 在2017年拿下三项大奖后,此团队自求突破,企图接受全新挑战: 开发自动车。The Imaging Source 映美精相机 在此项挑战中赞助DFK33GX265e相机以及相关配备,协助团队达成目标。
无人驾驶面临的挑战
由壳牌公司(The Shell Eco-marathon)主办三项著名的比赛,分别为壳牌环保赛车马拉松(Shell Eco-marathon)、车手世界杯(Drivers’ World Championship)以及自动车城市概念杯(Autonomous UrbanConcept)。TUfast的目标不只在参加最新的比赛项目(自动车城市概念杯),更有其他需要驾驶的比赛。受限于只能开发一辆车的规定,团队所创造出的概念车不只须符合所有自动驾驶竞赛中的要求,同时也要能压低车体本身的总重量。为了达到上述要求,TUfast 使用模块设计,开发出一项前所未有的概念。以此概念所打造出的设备则完全符合自动驾驶竞赛需求,又能很有效率的为效能竞赛减去车体本身的重量。

立体相机协助轨道测试: 学生们在muc018使用以相机为基础的数据侦测方式来进行主要的轨道测试。
此团队参与壳牌环保马拉松许多项任务,包含「停车挑战」,在此挑战中,团队仅仰赖以视觉为主的系统来辨识停车格,由软体操控车体进入最佳停车位置,使用以相机为基础的侦测数据,搭配超声波系统,导航至最后几公分的距离。TUfast Eco 团队为唯一完成此项任务的团队。最后竞赛的结果,TUfast 赢得可敬的第二名,与第一名只有几分之差。

所有自动驾驶竞赛都需要一位防卫车手;白手套则让裁判能简单的判别车手是否有碰触方向盘。
结束才是开始
紧跟在伦敦壳牌环保马拉松比赛后,学生已开始为明年竞争激烈的比赛进行规划。团队会继续使用立体相机系统,并延伸其功能,探究更新且更进步的主题(功能),例如深度测量以及立体SLAM (经由同步定位和映像之视觉测程),来因应2019年的赛季。
